BlinkM

Allows user to control BlinkM RGB LED via i2c interface.
API ReferenceHow To Connect
Install the package with: go get gobot.io/x/gobot
You must pass in an Adaptor that supports the i2c.Connector interface to use with this Driver.
You can use the following optional params if you wish to change the I2C Bus and I2C Address from the default values.
i2c.WithBus(int): bus to use with this driver.
i2c.WithAddress(int): address to use with this driver
// default bus/address blinkm := i2c.NewBlinkMDriver(adaptor) // optional bus/address blinkm := i2c.NewBlinkMDriver(adaptor, i2c.WithBus(0), i2c.WithAddress(0x34))
How To Use
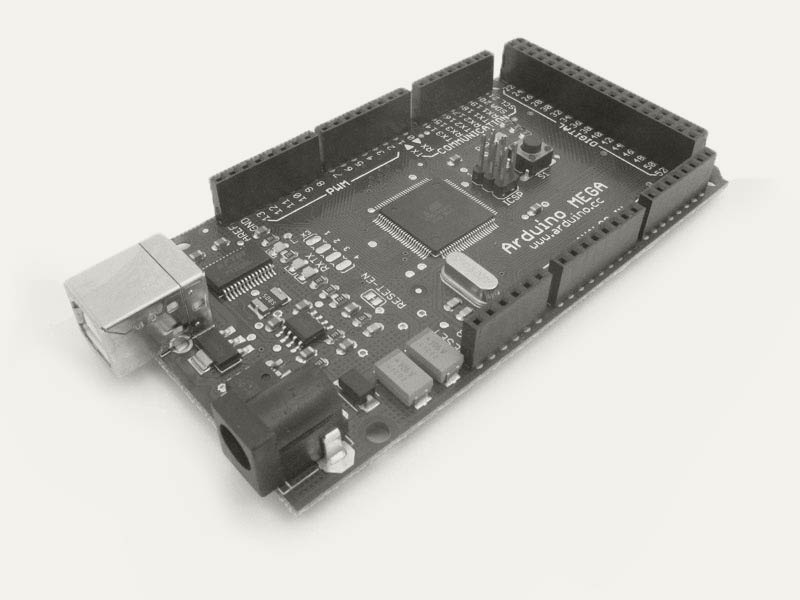
Example using a BlinkM and Arduino
package main import ( "fmt" "time" "gobot.io/x/gobot" "gobot.io/x/gobot/drivers/i2c" "gobot.io/x/gobot/platforms/firmata" ) func main() { firmataAdaptor := firmata.NewAdaptor("/dev/ttyACM0") blinkm := i2c.NewBlinkMDriver(firmataAdaptor) work := func() { gobot.Every(3*time.Second, func() { r := byte(gobot.Rand(255)) g := byte(gobot.Rand(255)) b := byte(gobot.Rand(255)) blinkm.Rgb(r, g, b) color, _ := blinkm.Color() fmt.Println("color", color) }) } robot := gobot.NewRobot("blinkmBot", []gobot.Connection{firmataAdaptor}, []gobot.Device{blinkm}, work, ) robot.Start() }
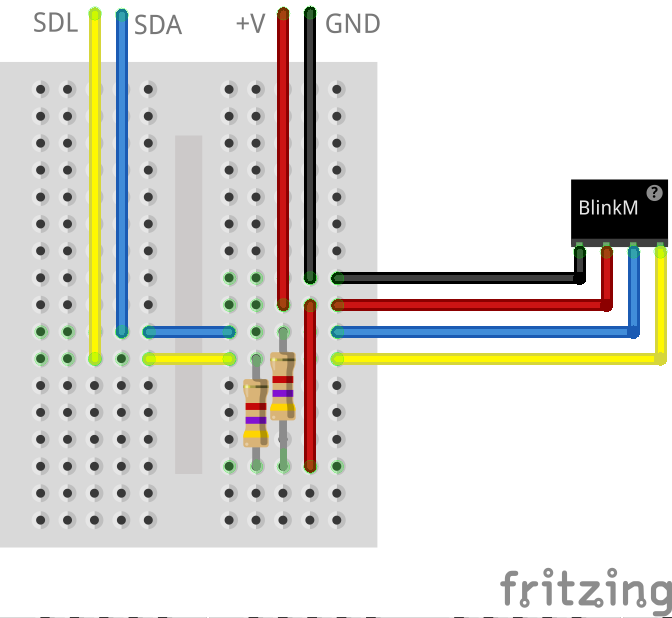
Circuit